
انکدر
انکدر چرخشی
در این پست با انکدرهای چرخشی و همچنین انواع آن آشنا خواهیم شد. همچنین در مورد ساخت و راه اندازی انکدرهای چرخشی خواهیم گفت. جدا از همه این موارد ، مزایا و معایب انکدرهای چرخشی نیز توضیح داده شده است.
انکدر چرخشی که به آن انکدر شافت نیز گفته می شود ، وسیله ای الکترو مکانیکی است که موقعیت زاویه ای یا حرکت شافت یا محور را به سیگنال های خروجی آنالوگ یا دیجیتال تبدیل می کند. انکدر چرخشی دو نوع اصلی دارد: مطلق و افزایشی. خروجی یک انکدر مطلق موقعیت شفت فعلی را نشان می دهد ، و آن را به یک مبدل زاویه ای تبدیل می کند. خروجی یک انکدر افزایشی اطلاعات مربوط به حرکت شافت را فراهم می کند ، که به طور معمول در جای دیگر به اطلاعاتی مانند موقعیت ، سرعت و فاصله پردازش می شود.
انکدرهای چرخشی در طیف وسیعی از برنامه ها که نیاز به نظارت یا کنترل ، یا هر دو سیستم های مکانیکی دارند ، از جمله کنترل های صنعتی ، رباتیک ، لنزهای عکاسی ، و ... مورد استفاده قرار می گیرند.
فن آوری های انکدر:
1. رسانا:
برای رمزگذاری اطلاعات از مجموعه ای از مسیرهای مس محیطی که بر روی PCB حک شده اند استفاده می شود. جاروبکهای تماسی نواحی رسانا را حس می کنند. این فرم از انکدرها اکنون به ندرت دیده می شود ، مگر اینکه به عنوان ورودی کاربر در مولتی متر دیجیتال باشد.
2. نوری:
در اینجا از نوری که از طریق شکافهای موجود در یک دیسک فلزی یا شیشه ای به یک فوتودیود می تابد استفاده می کند. نسخه های انعکاسی نیز وجود دارد. این یکی از رایج ترین فناوری ها است. انکدرهای نوری به گرد و غبار بسیار حساس هستند.
3. On-Axis Magnetic:
این فناوری معمولاً از آهن ربا نئودیمیم 2 قطب مغناطیسی شده متصل به شافت موتور استفاده می کند. از آنجا که می توان آن را به انتهای شافت ثابت کرد ، می تواند با موتورهایی کار کند که فقط 1 شافت از بدنه موتور امتداد داشته باشد. دقت می تواند از چند درجه تا زیر 1 درجه متفاوت باشد. رزولوشن ها می توانند به اندازه 1 درجه یا تا 09/0 درجه (4000 CPR ، تعداد در هر دور) باشند. درون یابی داخلی با طراحی ضعیف می تواند باعث ایجاد تکان دهنده در خروجی شود ، اما با میانگین گیری نمونه داخلی می توان بر این مسئله غلبه کرد.
4. مغناطیسی خارج از محور:
این فناوری معمولاً از مگنت های فریتی پیوند خورده به یک توپی فلزی استفاده می کند. این انعطاف پذیری در طراحی و هزینه کم برای برنامه های سفارشی را ارائه می دهد. با توجه به انعطاف پذیری در بسیاری از تراشه های انکدر خارج از محور ، می توان آنها را برنامه ریزی کرد تا هر تعداد عرض قطب را بپذیرند ، بنابراین تراشه را می توان در هر موقعیتی که برای برنامه مورد نیاز است قرار داد. انکدرهای مغناطیسی در محیط های سختی کار می کنند که انکدرهای نوری نمی توانند کار کنند.
انواع انکدرهای چرخشی:
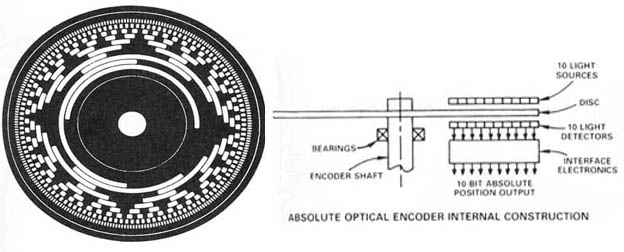
انکدر مطلق:
هنگامی که تغذیه یک انکدر مطلق از قطع می شود ، اطلاعات موقعیت را حفظ می کند. موقعیت انکدر با اعمال نیرو بلافاصله در دسترس است. رابطه بین مقدار انکدر و موقعیت فیزیکی ماشین کنترل شده در مونتاژ تنظیم می شود. برای حفظ دقت موقعیت ، سیستم نیازی به بازگشت به یک نقطه کالیبراسیون ندارد.
یک انکدر مطلق دارای چندین حلقه کد با وزن های مختلف باینری است که یک کلمه داده را نشان می دهد که موقعیت مطلق انکدر را در یک دور نشان می دهد. این نوع انکدر اغلب به عنوان انکدر مطلق موازی شناخته می شود.
انکدر چرخشی مطلق چند چرخشی شامل چرخ کد اضافی و چرخ دنده است. چرخ با وضوح بالا ، چرخش کسری را اندازه گیری می کند و چرخ های کد دنده ای با وضوح پایین ، تعداد کل چرخش های شافت را ثبت می کنند.
انکدر افزایشی:
یک انکدر افزایشی بلافاصله تغییرات موقعیت را گزارش می دهد ، که این یک توانایی اساسی در برخی از برنامه ها است. با این حال ، موقعیت مطلق را گزارش نمی کند یا پیگیری نمی کند. در نتیجه ، ممکن است لازم باشد سیستم مکانیکی که توسط یک انکدر افزایشی کنترل می شود ، به یک نقطه مرجع ثابت منتقل شود تا اندازه گیری موقعیت را آغاز کند.
انکدرهای چرخشی چگونه کار می کنند؟
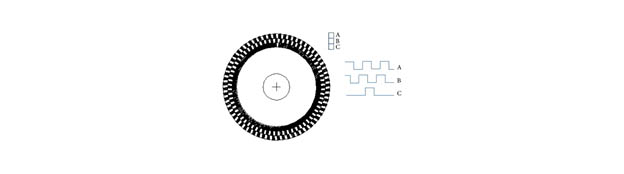
انکدر دارای یک دیسک با مناطق تماس به طور مساوی است که به پین مشترک C و دو پایه تماس جداگانه A و B متصل هستند ، همانطور که در زیر نشان داده شده است.
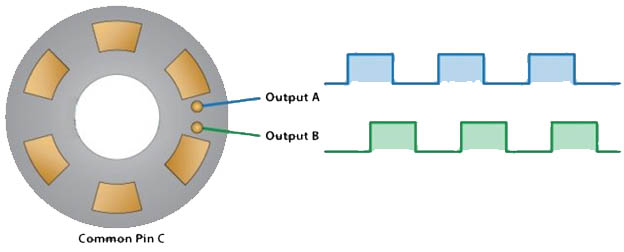
هنگامی که دیسک گام به گام شروع به چرخش می کند ، پین های A و B با پین مشترک تماس می گیرند و دو سیگنال خروجی موج مربع بر این اساس تولید می شوند.
اگر فقط پالس های سیگنال را بشماریم می توان از هر دو خروجی برای تعیین موقعیت چرخشی استفاده کرد. با این حال ، اگر می خواهیم جهت چرخش را نیز تعیین کنیم ، باید همزمان هر دو سیگنال را در نظر بگیریم.

می توانیم متوجه شویم که این دو سیگنال خروجی با فاصله 90 درجه از فاز یکدیگر جابجا می شوند. اگر انکدر در جهت عقربه های ساعت بچرخد ، خروجی A از خروجی B جلوتر خواهد بود.
بنابراین اگر هر بار که سیگنال تغییر می کند ، مراحل را از High به Low یا Low به High بشماریم ، می توانیم در آن زمان متوجه شویم که دو سیگنال خروجی مقادیر مخالف دارند. برعکس ، اگر انکدر در خلاف جهت ساعت بچرخد ، سیگنال های خروجی مقادیر برابر دارند. بنابراین با توجه به این موضوع ، ما می توانیم به راحتی کنترل کننده خود را برای خواندن موقعیت انکدر و جهت چرخش برنامه ریزی کنیم.
کاربردهای انکدرهای چرخشی:
انکدر می تواند در برنامه هایی که نیاز به بازخورد موقعیت ، سرعت ، مسافت و غیره دارند استفاده شود. مثالهای ذکر شده در زیر توانایی ها و پیاده سازی های گسترده یک انکدر را نشان می دهد:
1.ماشین های مونتاژ
2.بسته بندی
3.سیستم های نشانگر X و Y
4.چاپگرها
5.ماشین آلات آزمایش
6.دستگاه های CNC
7.رباتیک
8.دستگاه های برچسب زدن
9.تجهیزات پزشکی
10.منسوجات
11.ماشین آلات حفاری
21.فیدبک موتور
مزایا و معایب انکدرهای چرخشی:
مزایای انکدر
1. بسیار قابل اعتماد و دقیق
2. فیدبک کم هزینه
3. وضوح بالا
4. الکترونیک یکپارچه
5. فن آوری نوری و دیجیتال
6. قابلیت یکپارچه شدن با سیستم های کنترلی
7. اندازه جمع و جور
معایب انکدر
1. در معرض تداخل مغناطیسی یا رادیویی (انکدر مغناطیسی)
2. تداخل مستقیم منبع نور (انکدر نوری)
3. عملکرد نامطلوب در معرض آلودگی های خاک ، روغن و گرد و غبار